1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
| void calDLTParams(std::string objCornersFile,std::string imgCornersFile)
{
cv::vector<cv::Point3f> objCorner;
cv::vector<cv::Point2f> imgCorner;
std::ifstream in(objCornersFile.c_str());
if(!in){
std::cout << "Load objCorners ERROR: can't open file " << objCornersFile << std::endl;
return;
}
while(in){
cv::Point3f tmp;
in >> tmp.x >> tmp.y >> tmp.z;
objCorner.push_back(tmp);
}
in.close();
in.open(imgCornersFile.c_str());
if(!in){
std::cout << "Load imgCorners ERROR: can't open file " << imgCornersFile << std::endl;
return;
}
while(in){
cv::Point2f tmp;
in >> tmp.x >> tmp.y;
imgCorner.push_back(tmp);
}
in.close();
int N = imgCorner.size();
cv::Mat C(2*N, 11, CV_64F);
cv::Mat B(2*N, 1, CV_64F);
for(int i=0; i<2*N; i=i+2)
{
Utilities::matSet2D(C, 0, i, objCorner[i/2].x);
Utilities::matSet2D(C, 1, i, objCorner[i/2].y);
Utilities::matSet2D(C, 2, i, objCorner[i/2].z);
Utilities::matSet2D(C, 3, i, 1);
for(int j=4; j<8; j++)
Utilities::matSet2D(C, j, i, 0);
Utilities::matSet2D(C, 8, i, objCorner[i/2].x*imgCorner[i/2].x);
Utilities::matSet2D(C, 9, i, objCorner[i/2].y*imgCorner[i/2].x);
Utilities::matSet2D(C, 10, i, objCorner[i/2].z*imgCorner[i/2].x);
}
for(int i=1; i<2*N; i=i+2)
{
for(int j=0; j<4; j++)
Utilities::matSet2D(C, j, i, 0);
Utilities::matSet2D(C, 4, i, objCorner[i/2].x);
Utilities::matSet2D(C, 5, i, objCorner[i/2].y);
Utilities::matSet2D(C, 6, i, objCorner[i/2].z);
Utilities::matSet2D(C, 7, i, 1);
Utilities::matSet2D(C, 8, i, objCorner[i/2].x*imgCorner[i/2].y);
Utilities::matSet2D(C, 9, i, objCorner[i/2].y*imgCorner[i/2].y);
Utilities::matSet2D(C, 10, i, objCorner[i/2].z*imgCorner[i/2].y);
}
for(int i=0; i<2*N; i=i+2)
Utilities::matSet2D(B, 0, i, imgCorner[i/2].x);
for(int i=1; i<2*N; i=i+2)
Utilities::matSet2D(B, 0, i, imgCorner[i/2].y);
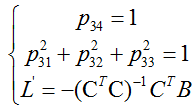
cv::Mat L = -(C.t()*C).inv()*C.t()*B;
std::string folderPath="";
folderPath += "/DLT.txt";
std::ofstream out(folderPath.c_str());
if(!out){
std::cout << "DLT write ERROR: can't open file " << folderPath << std::endl;
return;
}
for(int i=0; i<11; i++)
out << Utilities::matGet2D(L, 0, i) << '\n';
out.flush();
}
|